Abstract
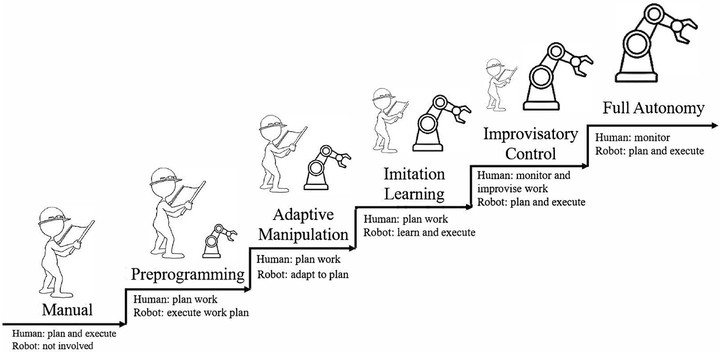
Construction robots continue to be increasingly deployed on construction sites to assist human workers in various tasks to improve safety, efficiency, and productivity. Due to the recent and ongoing growth in robot capabilities and functionalities, humans and robots are now able to work side-by-side and to share workspaces. The emerging field of human–robot collaboration has significant potential applications in construction and continues to advance the state of the art in defining the responsibilities of both humans and robots during collaborative work. This paper proposes a new taxonomy for collaborative human–robot work in construction teams. The evolution of construction robots during the last two decades is first reviewed, and relevant bodies of work are categorized into one of five levels of human–robot collaboration Preprogramming, Adaptive Manipulation, Imitation Learning, Improvisatory Control, and Full Autonomy. The categories of the proposed taxonomy are defined based on the level of robot autonomy and the corresponding human effort in collaborative teamwork. Second, this paper uses the categories of the proposed taxonomy as a contextual framework to identify current challenges and knowledge gaps in collaborative human–robot construction work and recommends directions for future research.
Ci-Jyun Polar Liang
Assistant Professor (Jan 2024)
My research interests include Human-Robot Collaboration, Computer Vision, Reinforcement Learning, BIM, Digital Twins, and Extended Reality.