Abstract
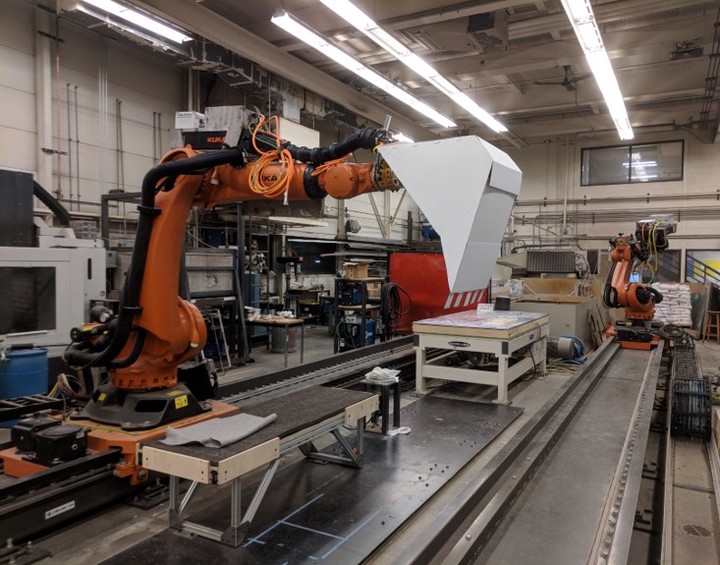
Struck-by accidents are potential safety concerns on construction sites and require a robust machine pose estimation. The development of deep learning methods has enhanced the human pose estimation that can be adapted for articulated machines. These methods require abundant dataset for training, which is challenging and time-consuming to obtain on-site. This paper proposes a fast data collection approach to build the dataset for excavator pose estimation. It uses two industrial robot arms as the excavator and the camera monopod to collect different excavator pose data. The 3D annotation can be obtained from the robot’s embedded encoders. The 2D pose is annotated manually. For evaluation, 2,500 pose images were collected and trained with the stacked hourglass network. The results showed that the dataset is suitable for the excavator pose estimation network training in a controlled environment, which leads to the potential of the dataset augmenting with real construction site images.
Ci-Jyun Polar Liang
Assistant Professor (Jan 2024)
My research interests include Human-Robot Collaboration, Computer Vision, Reinforcement Learning, BIM, Digital Twins, and Extended Reality.